
Bouwen van een remise met lift
Fase 3 is al weer enige tijd in bedrijf. Dan kom je er achter dat al die opstelsporen toch ook niet alles is. Opgestelde treinen staan stof te happen en twee opstelsporen zijn eigenlijk ook doorgaande sporen. Lastig dus als hier treinen staan opgesteld. Dat is niet erg flexibel.
Wat is handig. Robert kwam met het idee om een parkeergarage (remise) met lift te bouwen. Jaja, leuk idee, maar hoe bouw je zoiets? Waar moet je allemaal rekening mee houden? Als je daar over nadenkt dan realiseer je je wat er komt kijken bij het bouwen van een echte (personen) lift. Vooral als het om beveiliging gaat.
Alles op een rijtje gezet kom je tot de volgende vragen:
- Hoe wordt de lift aangedreven
- Welke kant moet de motor draaien vanuit een bepaalde verdieping
- Hoelang moet de motor draaien om bij een andere verdieping te komen
- Welke beveiligingen moeten er ingebouwd worden
- Welke informatie moet de computer krijgen om de treinen en beveiliging in goede banen te leiden
- Contragewichten
Over de technische invulling hiervan verwijzen we je graag naar het hoofdstuk Techniek/Lift deel 1.
We hebben een remise gebouwd van 4 verdiepingen (verdieping 0 t/m 3) en onder het emplacement geplaatst. Het tracé hebben we wat aangepast, twee enkelvoudige wissels zijn vervangen door kruiswissels zodat de lift op de hoogste stand (verdieping 4) precies tussen de sporen uit komt.
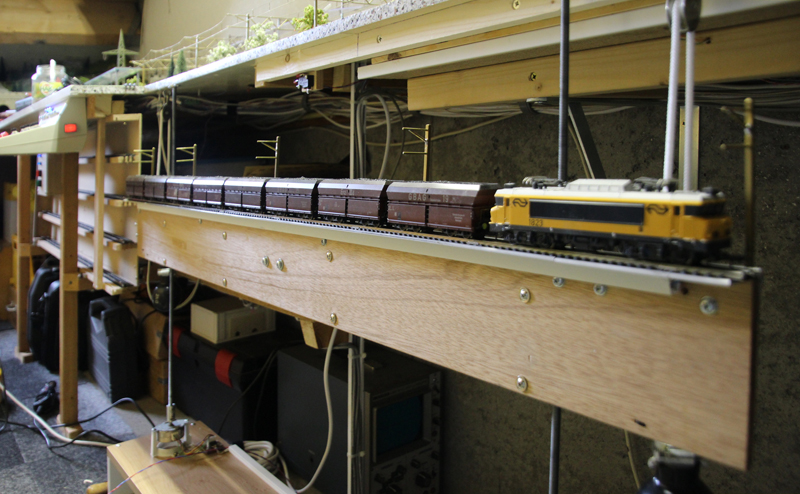 De lift met links de remise met 4 verdiepingen. De lift met links de remise met 4 verdiepingen. |
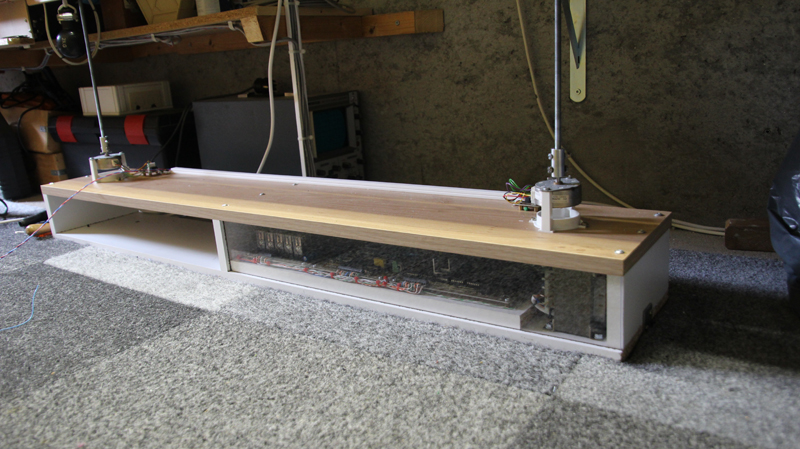 Kast met elektronica en stappenmotoren. Kast met elektronica en stappenmotoren. |
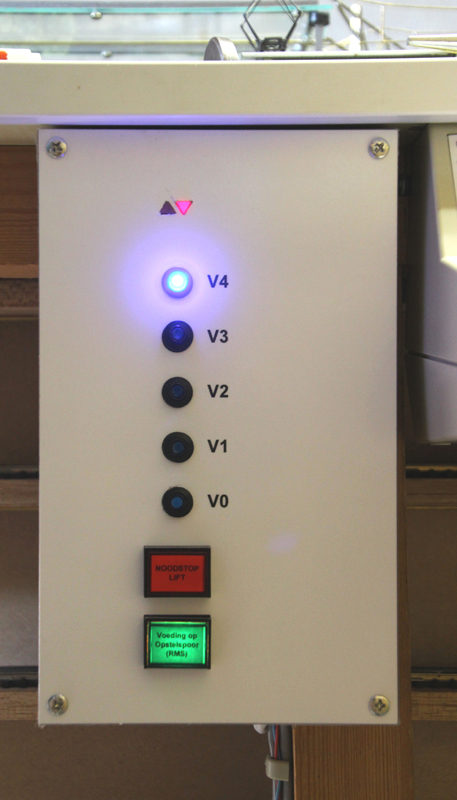 Bedienpaneel. Bedienpaneel. |
De lift wordt aangedreven door stappenmotoren. De stappenmotoren drijven ieder een draadstang M8 aan. Aan de achterzijde van de lift zijn moeren M8 aangebracht waar de draadstang in draait. Zo kan de lift op en neer bewegen, afhankelijk van de draairichting van de motoren. Deze stappenmotoren worden o.a. gebruikt in de speelautomaten (slots) van casino’s voor aandrijving van de rollinten.
Voordeel van een stappenmotor is dat deze uiterst nauwkeurig is aan te sturen zodat de lift exact op de juiste hoogte stopt. Nadeel van deze constructie is dat de snelheid van het op- en neer gaan van de lift erg traag is. Een stappenmotor verliest aan kracht naarmate de draaisnelheid toeneemt en dus de lift niet meer kan tillen.
Uitgebreide info hierover is te vinden op de pagina hoofdstuk Techniek/Lift deel 1.
Enkele maanden later….. Diepe Zucht……
We hebben enige tijd met deze constructie gewerkt. Zijn we er blij mee? Mmm, ja en nee. Na verloop van tijd ga je je ergeren aan de trage beweging van de lift. Daar komt nog bij dat zo af en toe door onbalans de lift scheef ging staan waardoor de motoren het niet meer kunnen trekken en dus vast lopen. Die onbalans wordt veroorzaakt door het gewicht van de locs op de lift. Bij lichte locs ging het wel, maar als bijvoorbeeld de BR01 (Stoomloc) op de lift staat, nou dan vergeet het maar. De lift is dan eenzijdig te zwaar, ondanks te contragewichten die we aan de lift hebben bevestigd. De BR01 weegt al gauw 1300 gram.
Tja, goede raad is duur. In ons geval inderdaad duur want we hebben besloten om de hele constructie van aandrijving te veranderen. Stappenmotoren gaan verdwijnen. Er komt één motor die alles aandrijft. We hebben gekozen voor een DC-transmissiemotor DO316.27613 (Conrad 198499). Deze motor met wormoverbrenging is akelig sterk. Het maakt nu niet meer uit hoe zwaar de lift wordt belast.
Aan de as van de motor is weer een as bevestigd van ongeveer 1.35 mtr. die aan beide zijden voorzien is van twee kettingtandwielen. Bovenin is ook een as met tandwielen gemonteerd. Over de tandwielen loopt een ketting die aan de lift is bevestigd. Dus aan de linkerkant en aan de rechterkant van de lift zit een ketting zodat de lift aan beide zijden wordt aangedreven. Kan dus niet meer scheef trekken door het in onbalans raken door het gewicht van de opgestelde trein op de lift.
De werkspanning van de motor is 24 volt, maar dan blijkt de motor te snel te draaien. We hebben een regelbare voeding toegepast zodat de draaisnelheid van de motor op aanvaardbaar niveau is in te stellen. Dit alles betekent dat ook de elektronica van de liftbesturing volledig moet worden aangepast. Dus nieuw ontwerp en nieuwe printplaten. Deze constructie draait nu al enige maanden tot volle tevredenheid.
Uitgebreide info hierover is te vinden op de pagina hoofdstuk Techniek/Lift deel 2.
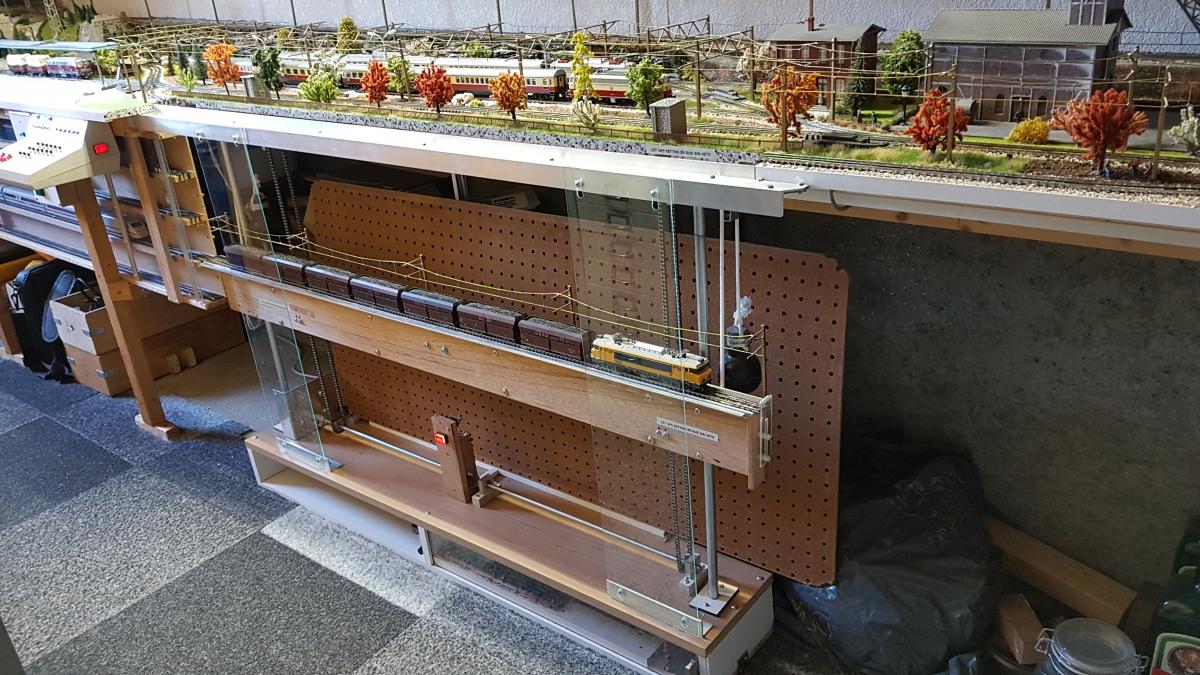 Er is wel één groot gevaar met deze constructie: Let op de kinderen die graag met de vingers willen kijken en overal aankomen. Vinger tussen de ketting en tandwiel? Jammer, vinger kwijt. De motor stopt echt niet. Ook personen met lange haren kunnen een gevaar vormen. Je moet er niet aan denken als ze met de haren er tussen komen. Uit voorzorg hebben we voor de kettingen een brede strook plexiglas geplaatst zodat er een redelijke bescherming is. Ook een noodknop is voorzien om de motor te stoppen bij een calamiteit. En mocht de constructie nu toch nog een keer vastlopen dan zal de motor zoveel stroom uit de voeding trekken dat een zekering zal doorsmelten. Een alarmsignaal is dan hoorbaar.
Er is wel één groot gevaar met deze constructie: Let op de kinderen die graag met de vingers willen kijken en overal aankomen. Vinger tussen de ketting en tandwiel? Jammer, vinger kwijt. De motor stopt echt niet. Ook personen met lange haren kunnen een gevaar vormen. Je moet er niet aan denken als ze met de haren er tussen komen. Uit voorzorg hebben we voor de kettingen een brede strook plexiglas geplaatst zodat er een redelijke bescherming is. Ook een noodknop is voorzien om de motor te stoppen bij een calamiteit. En mocht de constructie nu toch nog een keer vastlopen dan zal de motor zoveel stroom uit de voeding trekken dat een zekering zal doorsmelten. Een alarmsignaal is dan hoorbaar.