Lift deel 2
Nadat de lift enkele maanden met de stappenmotoren had gewerkt waren we toch niet zo tevreden met deze constructie. Lift blokkeerde af en toe door ongelijke gewichtsverdeling als er een loc op de lift staat. Vooral de BR01 gaf regelmatig problemen want dit loc weegt bij elkaar toch ongeveer 1300 gram. Dat konden de stappenmotoren niet goed aan, ondanks de tegengewichten die aan de lift waren bevestigd.
Verder ergerden we ons aan de trage snelheid van de lift. De stappenmotoren kunnen wel wat sneller draaien maar dat gaat ten koste van het koppel van de motoren. Zie de uitleg in Lift deel 1.
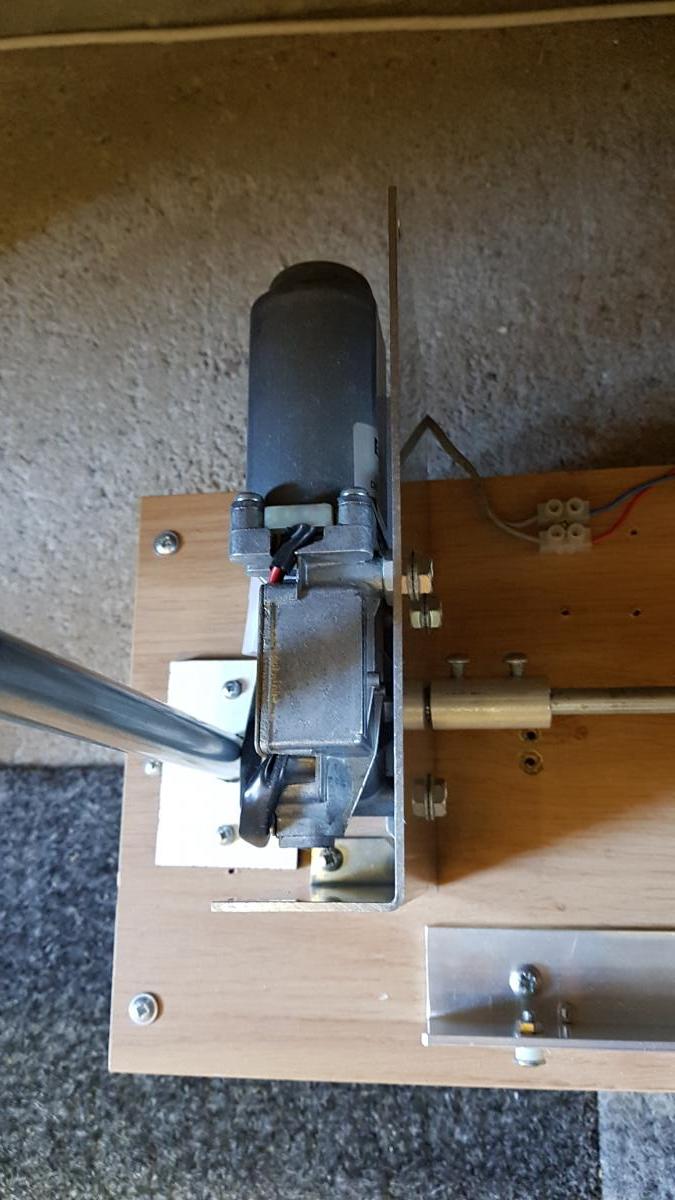 << Motor en asconstructie van bovenaf gezien
<< Motor en asconstructie van bovenaf gezien
 Tandwiel met ketting en kogellagerhuis >>
Tandwiel met ketting en kogellagerhuis >>
Dus even diep zuchten en de beslissing genomen om alles te slopen en opnieuw beginnen met een andere constructie.
Stappenmotoren en draadstangen verdwijnen en een andere motor toegepast. We hebben gekozen voor een DC-transmissiemotor DO316.27613. Deze motor met wormoverbrenging is akelig sterk. Het maakt nu niet meer uit hoe zwaar de lift wordt belast. In het verlengde van de motoras is een as bevestigd van ongeveer 1.35 mtr. 8 mm dik die aan beide zijden voorzien is van twee kettingtandwielen. Bovenin is ook een as met tandwielen gemonteerd. Beide assen worden door kogellagers in een kogellagerbehuizing op hun plaats gehouden. Over de tandwielen loopt een ketting die aan de lift is bevestigd.
Voor de liefhebbers:
DC Motor: Conrad 198499
Kettingtandwiel: Conrad 237136
Kogellager: Conrad 215295
Kogellagerhuis: Conrad 216011
Rolketting: Conrad 237167
De werkspanning van de motor is 24 volt, maar dan blijkt de motor te snel te draaien. We hebben een regelbare voeding toegepast zodat de draaisnelheid van de motor op aanvaardbaar niveau is in te stellen. Dus ook de elektronica moet volledig aangepast worden. Deze constructie draait nu al enige maanden tot volle tevredenheid.
Liftaandrijving
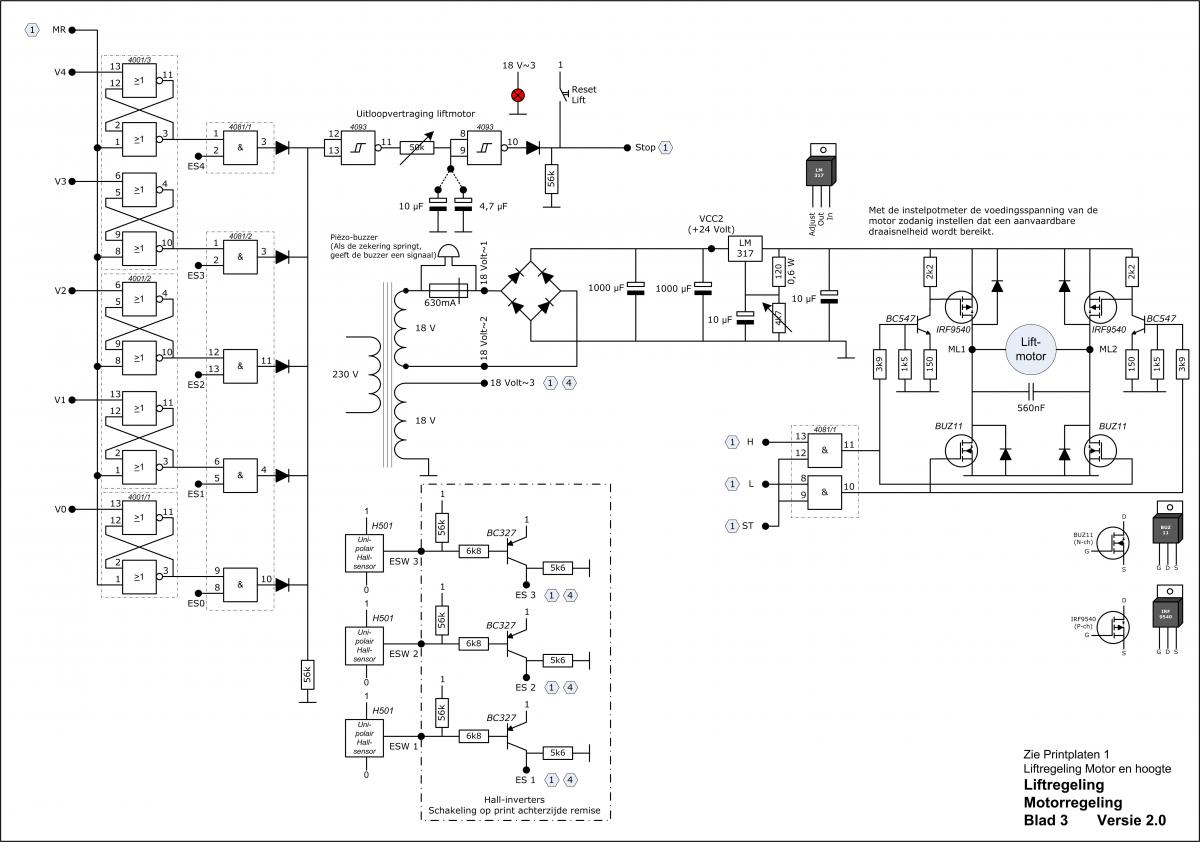 Voor de aandrijving van de motor is een H-aandrijving ontworpen. Afhankelijk van de richting van de lift wordt de mosfet links-boven en rechts-onde
Voor de aandrijving van de motor is een H-aandrijving ontworpen. Afhankelijk van de richting van de lift wordt de mosfet links-boven en rechts-onde r (stroom door de motor van links naar rechts, lift stijgt) of de mosfet rechts-boven en links-onder (stroom door de motor van rechts naar links, lift daalt) aangestuurd. Deze mosfets zijn op een koelplaat gemonteerd.
r (stroom door de motor van links naar rechts, lift stijgt) of de mosfet rechts-boven en links-onder (stroom door de motor van rechts naar links, lift daalt) aangestuurd. Deze mosfets zijn op een koelplaat gemonteerd.
Zoals hierboven al verteld is een regelbare voeding gebruikt om de draaisnelheid van de motor op een aanvaardbaar toerental te krijgen. De toegepaste motor is oorspronkelijk geschikt voor 24 Volt. Wij hebben de voeding ingesteld op ongeveer 12 Volt.
In het voedingscircuit is een zekering van 630 mA aangebracht. Als de lift vast zou lopen dan gaat de motor meer stroom vragen en zal de zekering smelten. Over de zekering is een piëzo buzzer geplaatst die dan als sirene dienst doet. Deze beveiliging heeft zijn nut al bewezen!
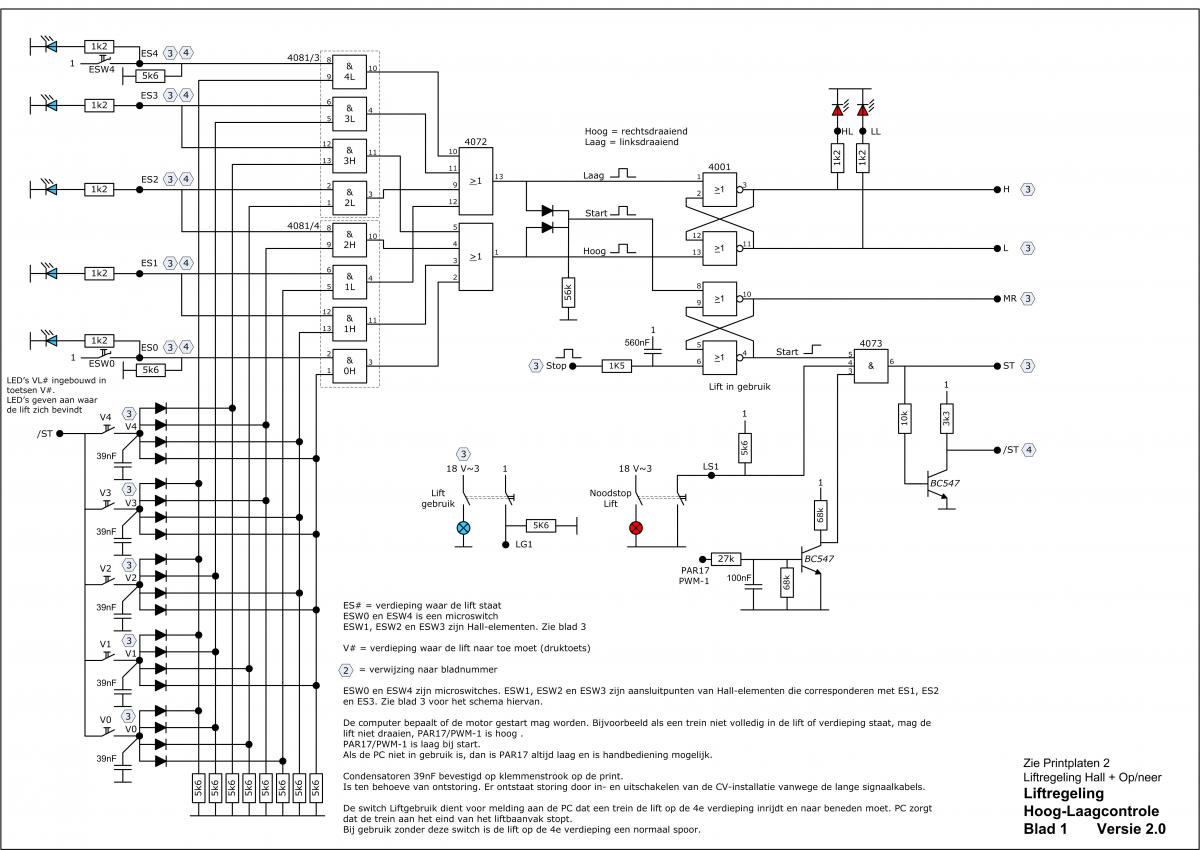 De hoogtebepaling is ook veranderd. De stappenmotor in deel 1 werkt met stuurpulsen. Dus was het eenvoudig om het aantal stuurpulsen
De hoogtebepaling is ook veranderd. De stappenmotor in deel 1 werkt met stuurpulsen. Dus was het eenvoudig om het aantal stuurpulsen  te tellen om een nauwkeurige hoogte instelling te krijgen. Met de nu toegepaste motor ligt dat toch wel even anders. Aan de remise is bij elke verdieping een Hall-element geplaatst en aan de lift een magneet. Nauwkeurig afstellen van de magneet en de Hall-elementen en de lift stopt behoorlijk precies op de juiste hoogte. De uitloop van de motor is instelbaar gemaakt zodat een nog nauwkeuriger instelling mogelijk is.
te tellen om een nauwkeurige hoogte instelling te krijgen. Met de nu toegepaste motor ligt dat toch wel even anders. Aan de remise is bij elke verdieping een Hall-element geplaatst en aan de lift een magneet. Nauwkeurig afstellen van de magneet en de Hall-elementen en de lift stopt behoorlijk precies op de juiste hoogte. De uitloop van de motor is instelbaar gemaakt zodat een nog nauwkeuriger instelling mogelijk is.
Beveiliging
Behalve controle op het vastlopen van de lift is er nog een groot gevaar: Let op de kinderen die graag met de vingers willen kijken en overal aankomen. Vinger tussen de ketting en tandwiel? Jammer, vinger kwijt. De motor stopt echt niet. Ook personen met lange haren kunnen een gevaar vormen. Je moet er niet aan denken als ze met de haren er tussen komen. Uit voorzorg hebben we voor de kettingen een brede strook plexiglas geplaatst zodat er een redelijke bescherming is. Ook een noodknop is voorzien om de motor te stoppen bij een calamiteit.
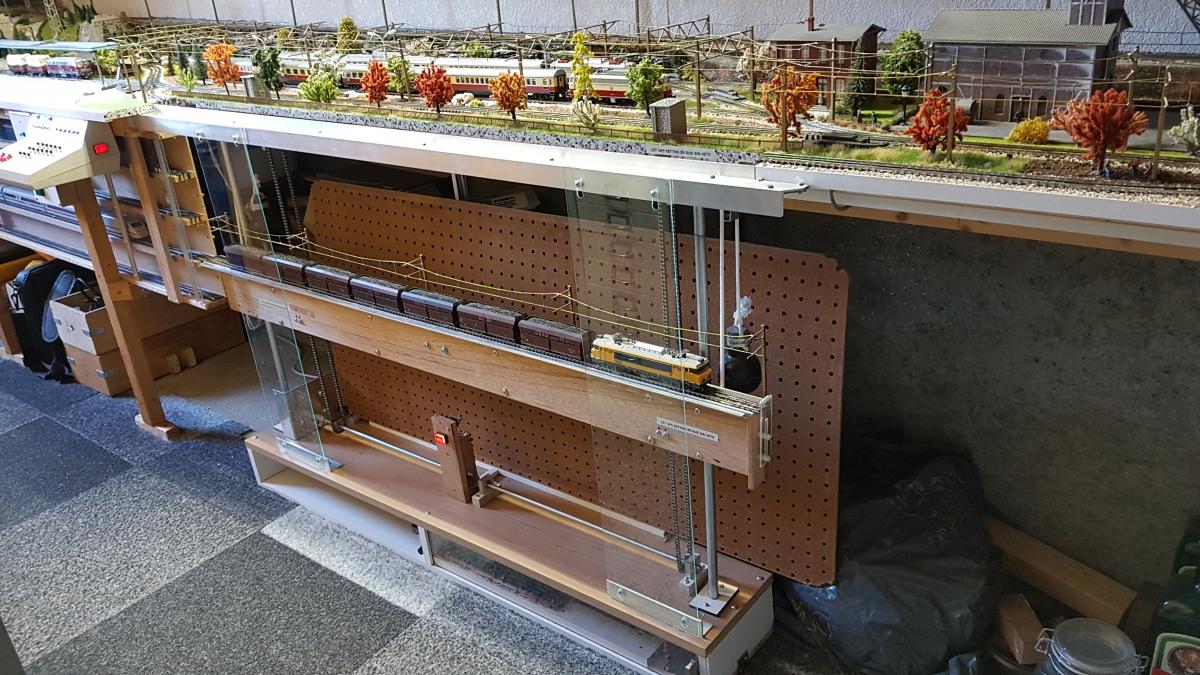 De lift met links de remise met 4 verdiepingen De lift met links de remise met 4 verdiepingenPlexiglas voor de kettingen en tandwielen |
 Deel van de remise Deel van de remise |
 Kogellagerbehuizing Kogellagerbehuizing |