Bouwen van een lift en remise
In fase 3 hadden we vier opstelsporen gemaakt voor het parkeren van treinen die even niet mogen rijden. Maar na verloop van tijd blijkt dit niet zo’n handige oplossing te zijn. Doorgaande sporen zijn niet of onhandig te gebruiken en opgestelde treinen staan stof te happen.
Na enig overleg met de mede-bouwers kwam Robert op het idee om een remise met lift te bouwen. Goed idee, maar waar begin je dan aan? Hoe maak je een lift die op de tiende millimeter nauwkeurig stopt bij de gewenste verdieping? De meest voor de hand liggende oplossing is een microswitch per verdieping, maar die krijg je niet nauwkeurig genoeg gemonteerd.
Verder komen er vragen zoals:
- Hoe wordt de lift aangedreven
- Welke kant moet de motor draaien vanuit een bepaalde verdieping
- Hoelang moet de motor draaien om bij een andere verdieping te komen
- Welke beveiligingen moeten er ingebouwd worden
- Welke informatie moet de computer krijgen om de treinen en beveiliging in goede banen te leiden
 Tijdens het ontwerpen van de elektronica realiseer je je ineens hoe “normale” liften gebouwd, bestuurt en beveiligd moeten zijn. Dat is een heel interessant onderwerp.
Tijdens het ontwerpen van de elektronica realiseer je je ineens hoe “normale” liften gebouwd, bestuurt en beveiligd moeten zijn. Dat is een heel interessant onderwerp.
Eerst maar eens een grof ontwerp op papier zetten en de remise bouwen. De verdiepingen moeten zeer nauwkeurig op de juiste hoogte gemaakt worden. Op de tiende millimeter nauwkeurig. Waarom? Zie verderop bij ‘Hoogte berekenen’.
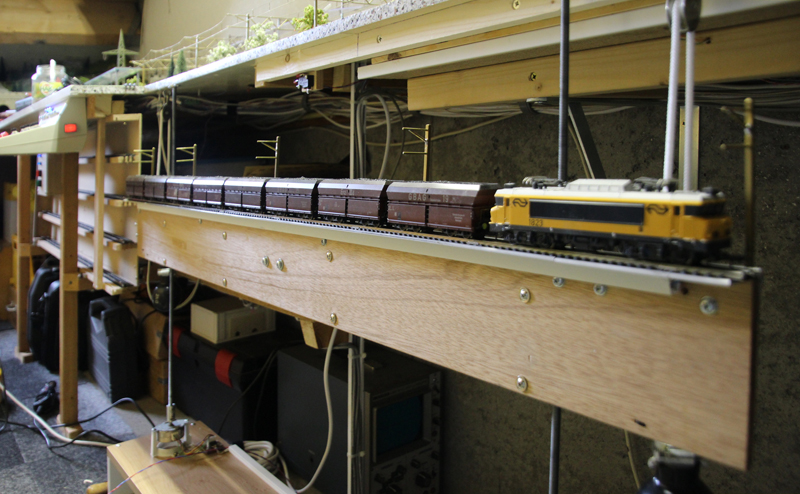
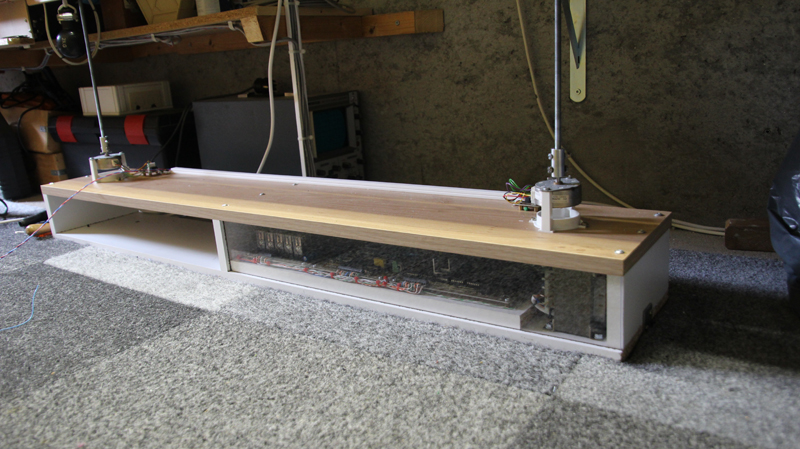
De remise is onder het emplacement gemonteerd. Het omvat de verdiepingen 0, 1, 2 en 3, van onderaf gezien. De 4e verdieping is de verdieping waar het emplacement ligt.
Op de foto lijkt het alsof de remise aan het eind scheef staat, maar de kast staat nog los, moet nog goed gemonteerd worden. We zijn hier nog in de opbouw- en testfase. Als alles klaar is wordt de remise nog voorzien van een afneembaar plexiglas afscherming zodat de treinen worden beschermd tegen stof en grijpgrage handjes van kinderen, maar toch zichtbaar zijn.
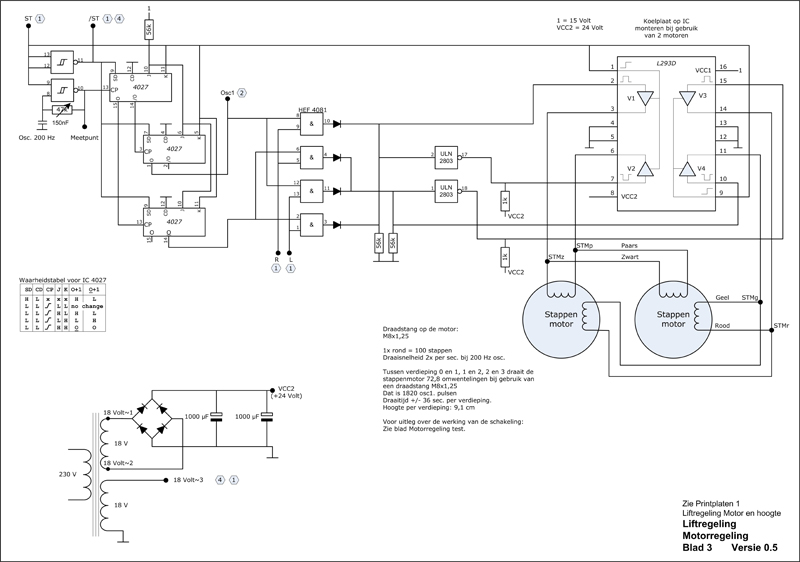
Liftaandrijving
De volgende stap is het bouwen van de lift met de aandrijving. De lift wordt aangedreven door twee stappenmotoren. Op de as van de motoren is een draadstang gemonteerd die al draaiende de lift laat stijgen of dalen. De draadstang heeft M8 schroefdraad en achterop de lift zijn moeren bevestigd waarin de draadstang draait en zo de lift in beweging zet.
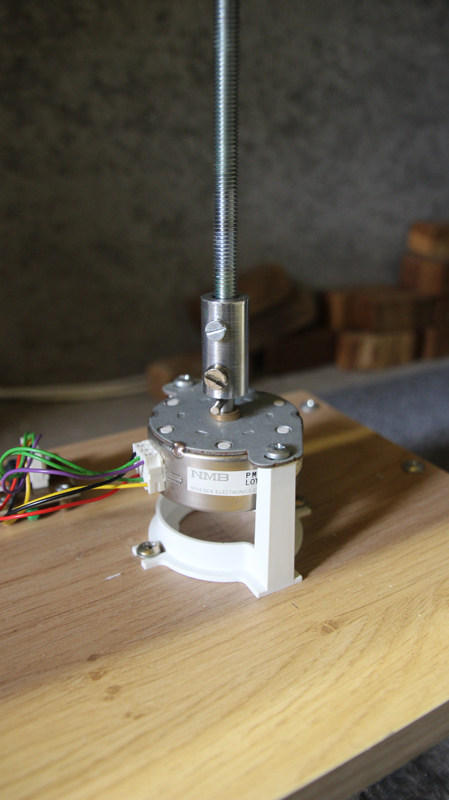 Deze motoren komen uit een speelautomaat (slots) die in casino’s staan (PM55L-100). Ze drijven de rollinten aan.
Deze motoren komen uit een speelautomaat (slots) die in casino’s staan (PM55L-100). Ze drijven de rollinten aan.
Een stappenmotor heeft het voordeel dat deze zeer nauwkeurig op een bepaalde stand is in te stellen. De gebruikte motoren maken 100 stappen per omwenteling. Een draadstang met M8 schroefdraad heeft een spoed van 1,25 mm (spoed is het aantal mm ’s dat de moer of bout per omwenteling opschuift). Dus elke stap stijgt of daalt de lift 0,0125 mm. Zo is een zeer nauwkeurige afstelling van de lift mogelijk. Een elektronische teller telt het aantal pulsen wat naar de motor wordt gestuurd. Afhankelijk van de (voorgeprogrammeerde) matrix en het aantal verdiepingen wat moet worden afgelegd zal de lift exact op de juiste hoogte stoppen.
 Een stappenmotor heeft geen uitloop zoals normale motoren, dus stopt onmiddellijk als er geen pulsen worden gestuurd.
Een stappenmotor heeft geen uitloop zoals normale motoren, dus stopt onmiddellijk als er geen pulsen worden gestuurd.
Er worden twee motoren gebruikt die links en rechts van de lift zijn gemonteerd wat de stabiliteit van de lift ten goede komt. Tevens wordt het gewicht van de lift over de twee motoren verdeeld. Beide motoren zijn elektrisch parallel geschakeld zodat ze synchroon lopen.
Een stappenmotor heeft ook nadelen. Je kunt niet onbeperkt de draaisnelheid opvoeren. De constructie van een stappenmotor laat dat niet toe. De kracht van de motor neemt af naarmate de snelheid toeneemt. Dit komt omdat een motor al draaiende een zelfinductie opwekt waardoor het elektrisch opgenomen vermogen afneemt, met gevolg dat het afgegeven mechanisch vermogen dus ook afneemt. Hoe hoger de snelheid, hoe hoger de zelfinductie en dus afname van het afgegeven vermogen.
 De door ons toegepaste draaisnelheid is 2 omwentelingen per seconde, dus 200 stappen per seconde.
De door ons toegepaste draaisnelheid is 2 omwentelingen per seconde, dus 200 stappen per seconde.
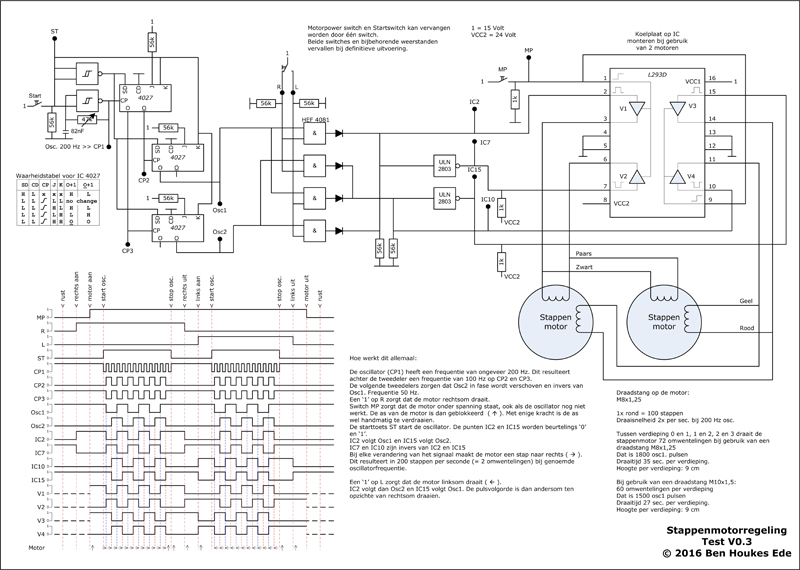
Hoe werkt een stappenmotor? De door ons toegepaste motoren hebben twee gescheiden wikkelingen die beurtelings worden aangestuurd. Uitleg staat op de tekening links. Deze schakeling is gebruikt om de stappenmotoren te testen, de werkelijk toegepaste schakeling ziet er iets anders uit. De stappenmotor aandrijving wordt gestuurd door de L293D Quadruple Half-H Drivers.
Om de motoren te ontlasten zijn aan beide zijden van de lift contragewichten van ieder 1 kg gemonteerd die het gewicht van de lift compenseert. De motoren worden nu hoofdzakelijk belast met het gewicht van de trein die verplaatst moet worden. De zwaarste trein weegt ongeveer 1900 gram (loc + wagons).
Draairichting bepalen (stijgen of dalen)
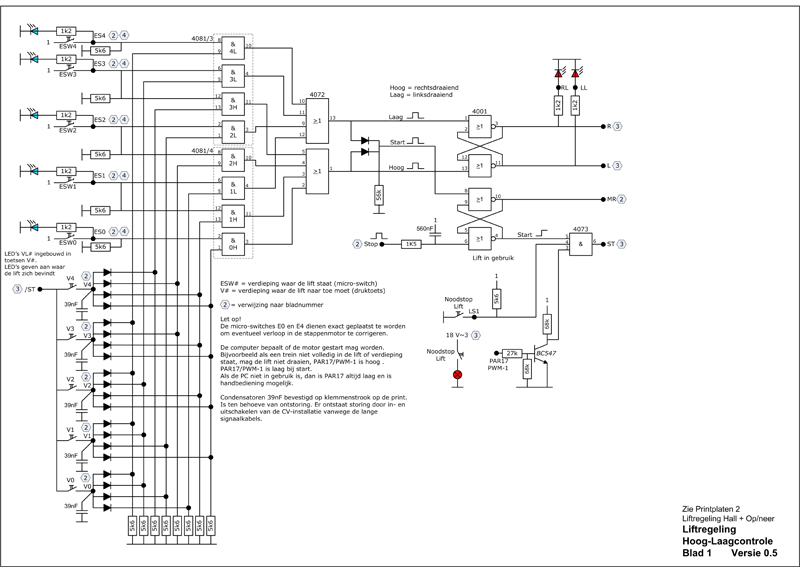 De microswitches ESW worden toegepast om bij opstarten van het emplacement de elektronica te laten weten waar de lift staat. Tevens dienen de switches ESW0 en ESW4 er voor om eventueel verloop van de motoren te compenseren. In de uiterste standen (verdieping 4 en verdieping 0) worden de switches nauwkeurig gemonteerd. De motoren stoppen op deze verdiepingen niet door de elektronica, maar door het schakelen van de switches. Door exacte afstelling van deze switches staat de lift altijd op de juiste hoogte.
De microswitches ESW worden toegepast om bij opstarten van het emplacement de elektronica te laten weten waar de lift staat. Tevens dienen de switches ESW0 en ESW4 er voor om eventueel verloop van de motoren te compenseren. In de uiterste standen (verdieping 4 en verdieping 0) worden de switches nauwkeurig gemonteerd. De motoren stoppen op deze verdiepingen niet door de elektronica, maar door het schakelen van de switches. Door exacte afstelling van deze switches staat de lift altijd op de juiste hoogte.
In grote lijnen werkt het als volgt:
Stel, de lift staat op verdieping 2. ESW2 is omgeschakeld. De lift moet naar verdieping 3. Door het drukken van V3 op het bedienpaneel zal via een diodematrix, And-gate 2 en een Or-gate een flip flop geset worden. Led LL gaat branden wat aangeeft dat de motoren linksom gaan draaien, dus de lift gaat stijgen.
Via een andere flip flop wordt de algemene reset (MR) opgeheven en ST wordt ‘1’ (start oscillator).
Dit starten is nog afhankelijk van twee voorwaarden:
- De computer constateert geen belemmeringen (PAR17-PWM1 = ‘0’)
- De noodstop lift is niet ingedrukt
 De toegepaste motorbesturing:
De toegepaste motorbesturing:
Als tijdens het verplaatsen van de lift een probleem wordt ontdekt kan de lift handmatig worden gestopt door op het bedienpaneel de noodknop in te drukken. Als het probleem is opgelost kan door nogmaals de nood knop in te drukken, de lift weer verdergaan. Dit heeft geen invloed op de elektronische telling.
Hoogte berekenen
 De verdiepinghoogte bepaalt het aantal te meten pulsen naar de motoren.
De verdiepinghoogte bepaalt het aantal te meten pulsen naar de motoren.
1 verdieping: 1820 pulsen
2 verdiepingen: 3640 pulsen
3 verdiepingen: 5460 pulsen
Tussen de 3e en 4e verdieping is extra ruimte vanwege de plaatsing van de remise. Dit resulteert in 1140 extra pulsen, opgeteld bij het aantal verdiepingen dat moet worden afgelegd als de lift vanaf de 4e verdieping vertrekt.
In grote lijnen:
Stel, de lift staat op verdieping 3 en moet naar verdieping 1. ESW3 is omgeschakeld, dus ES3 is ‘1’. Door het drukken van V1 op het bedienpaneel zal via And-gate H2 (4081/2) en een diodematrix de flip flop 3640 geset worden (verplaatsing van 2 verdiepingen).
De teller ontvangt de pulsen naar de motor via OSC1 en zal doortellen totdat 3640 pulsen zijn geteld.
Alle ingangen van And-gate &2 (H2-3640) zijn dan ‘1’. De uitgang van deze gate wordt ‘0’ en ‘Stop’ wordt ‘0’.
ST (op de vorige tekening) wordt ‘0’, de oscillator stopt en dus stoppen de motoren.
In- en uitrijden
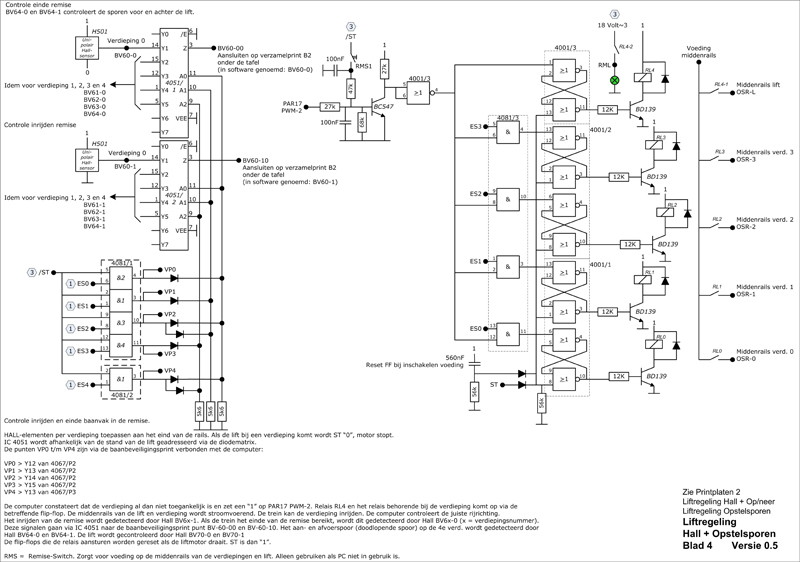 De lift is bij verdieping 1 aangekomen en is gestopt. ESW1 is omgeschakeld, ES1 = ‘1’. De computer zal een signaal sturen naar de 1e en de 4e flip flop en worden geset. De rails op de lift en in de 1e verdieping worden van rijspanning voorzien zodat een trein uit de remise de lift kan oprijden, of andersom, vanaf de lift de remise kan inrijden. Bij gebruik zonder computer kan op het bedienpaneel toets RMS (groene toets) worden ingedrukt om de betreffende flip flops te setten.
De lift is bij verdieping 1 aangekomen en is gestopt. ESW1 is omgeschakeld, ES1 = ‘1’. De computer zal een signaal sturen naar de 1e en de 4e flip flop en worden geset. De rails op de lift en in de 1e verdieping worden van rijspanning voorzien zodat een trein uit de remise de lift kan oprijden, of andersom, vanaf de lift de remise kan inrijden. Bij gebruik zonder computer kan op het bedienpaneel toets RMS (groene toets) worden ingedrukt om de betreffende flip flops te setten.
De computer bepaalt dus of dit mag. Stel dat op de lift een trein staat die de verdieping wilt inrijden, maar er staat al een trein….. De computer staat dat niet toe en zal geen rijspanning geven.
Mag dit wel, dan controleert de computer via Hall-elementen wanneer de trein het uiterste punt bereikt om deze te laten stoppen. (Linker deel van de tekening)
Een tweetal analoge decoders 4051 worden door ES0 t/m 4 geadresseerd om de juiste Hall-elementen te selecteren.
De computer wordt geïnformeerd waar de lift zich bevindt door de punten VP0 t/m VP4. Deze zijn met de computer verbonden via de computerinterface printplaat.
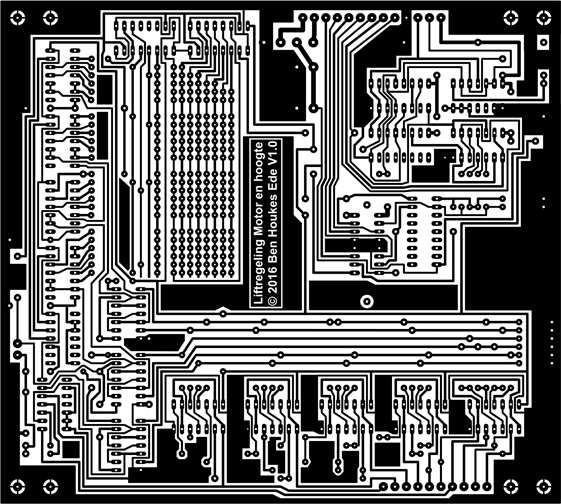
Voor de elektronica moeten natuurlijk ook weer printplaten ontworpen en gemaakt worden:
 |
 |
 |